
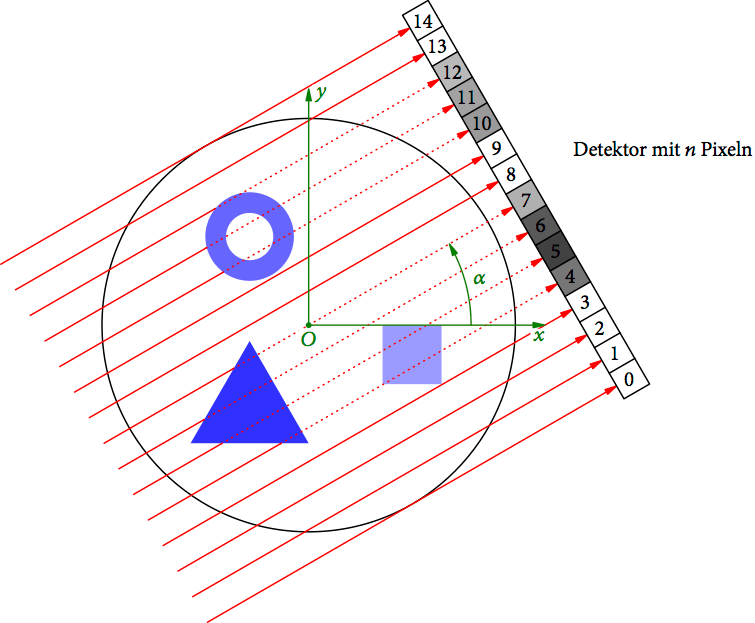
Im letzten Teil haben wir gesehen, dass Objekte Licht in unterschiedlichem Ausmaß durchlassen können. Im Folgenden werden wir uns nur mit Absorption beschäftigen. Abb. 1 zeigt unsere bereits aus Teil 1 bekannten Objekte, allerdings mit unterschiedlichen Absorptionskoeffizienten. Zusätzlich ist der Kreis jetzt ein innen hohler Kreisring. Die Detektorpixel sind jetzt nicht mehr nur schwarz/weiß, sondern zeigen auch Helligkeiten dazwischen.
 , der Kreisring hat
, der Kreisring hat  und das Quadrat hat
und das Quadrat hat  .
. und
und  liegen, gehören auf jeden Fall dazu. Aber welche noch?
liegen, gehören auf jeden Fall dazu. Aber welche noch?
 handelt, ist das Gitter sinnvollerweise quadratisch, und die Anzahl der Pixel in
handelt, ist das Gitter sinnvollerweise quadratisch, und die Anzahl der Pixel in  – und
– und  -Richtung wird gleich gewählt, also
-Richtung wird gleich gewählt, also  . Die Pixel sind dann Quadrate mit einer realen Seitenlänge von
. Die Pixel sind dann Quadrate mit einer realen Seitenlänge von  . Um die Formeln etwas zu vereinfachen wählen wir für
. Um die Formeln etwas zu vereinfachen wählen wir für  eine gerade Zahl, was keine große Einschränkung bedeutet.
eine gerade Zahl, was keine große Einschränkung bedeutet.
 -Achse zeigt wie die
-Achse zeigt wie die  -Achse zeigt entgegen der
-Achse zeigt entgegen der 
