
Eine Linie aus kleinen Quadraten
In Teil 5 haben wir die Rasterung besprochen und gesehen, wie man Punkt-Koordinaten in der »realen« Welt in Pixel-Koordinaten umrechnet. Jetzt müssen wir diese Punkte durch eine Linie aus Pixeln verbinden (s. Abb. 1). Die Pixel, in denen die Punkte 

 und ?
und ?Dieses Problem trat schon zu Beginn der Computergraphikära auf und wurde in den verschiedensten Varianten gelöst. Im Folgenden besprechen wir eine Variante des Bresenham-Algorithmus für Linien.
Geradengleichung für Punkte
Eine Gerade in der Ebene durch die Punkt 


wobei 




Geradengleichung für Pixel
Die Pixel-Koordinaten der beiden Punkte sind 



erfüllen, wobei 

Dabei gibt es aber zwei Probleme. Erstens, 



Problematischer ist, dass die Pixel 

Wir starten im Pixel 





Der folgende C++ Pseudocode zeigt die Details des Algorithmus (zur Erinnerung: 
void line(P, Q)
{
// umrechnen in Pixel-Koordinaten
const int Pi = (int)floor( Px / s) + n / 2;
const int Pj = (int)floor(-Py / s) + n / 2;
const int Qi = (int)floor( Qx / s) + n / 2;
const int Qj = (int)floor(-Qy / s) + n / 2;
// Abstände in i- und j-Richtung
const int di = Qi - Pi; // Delta i
const int dj = Qj - Pj; // Delta j
// Schritte in i- und j-Richtung
const int si = (di > 0) ? 1 : -1; // Schritt nach links oder rechts?
const int sj = (dj > 0) ? 1 : -1; // Schritt nach unten oder oben?
// wir starten im Pixel P
int i = Pi;
int j = Pj;
// und müssen P jedenfalls zeichnen
fillPixel(i, j);
// zu Beginn ist die Abweichung sicher 0
int e = 0;
// wir müssen außer P insgesamt |di| + |dj| Pixel füllen
for (int k = 1; k <= abs(di) + abs(dj); ++k) {
// mögliche Abweichungen in i- und j-Richtung ausrechnen
// i und j werden jeweils um plus/minus 1 geändert
const int e_i_pm_1 = e + si * dj;
const int e_j_pm_1 = e - sj * di;
// in die Richtung mit der absolut kleineren Abweichung gehen
if (abs(e_i_pm_1) < abs(e_j_pm_1)) {
i += si;
e = e_i_pm_1;
}
else {
j += sj;
e = e_j_pm_1;
}
// nächsten Pixel zeichnen
fillPixel(i, j);
}
}
Das Ergebnis zeigt Abb. 2. Von 4 Pixeln, die ein Quadrat bilden, werden 2–3 eingefärbt. Bei einigen kann man sich fragen, ob es nicht besser wäre, das diagonal gegenüberliegende eingefärbt zu haben. Warum es manchmal nicht so wie erwartet klappt, liegt daran, dass die Punkte nicht immer exakt in der Mitte der Pixel liegen, sondern irgendwo innerhalb, und damit zusammenhängend, dass die Steigung der Pixelgeraden nicht exakt gleich der Steigung der realen Geraden ist. Rein prinzipiell könnte man das beim Vergleich der Abweichungen in
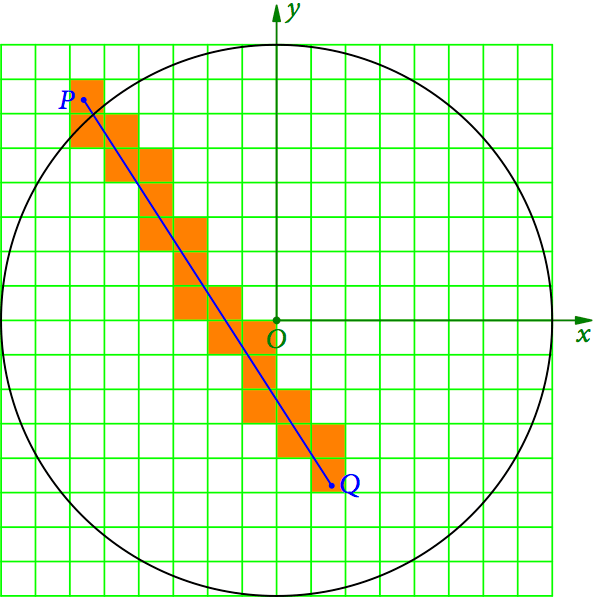
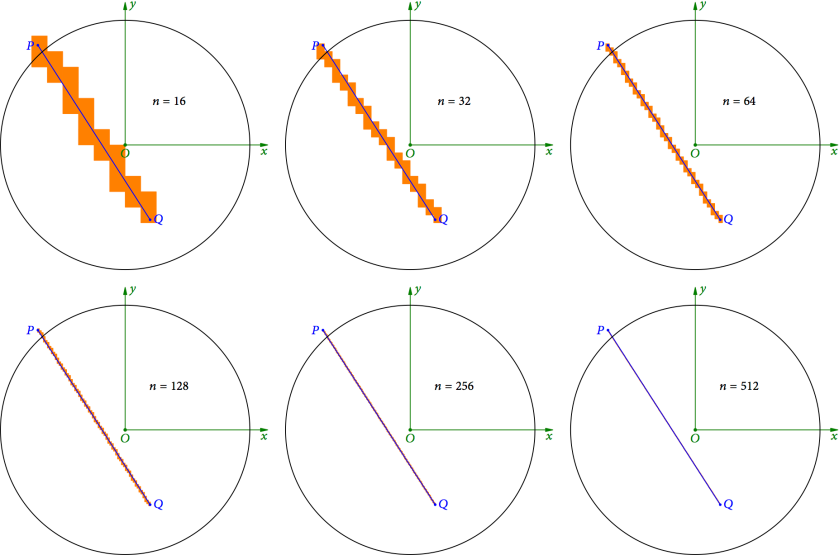
Abb. 3 vergleicht die Linie aus Abb.2 für verschiedene Auflösungen des Bildes, von (16×16) bis (512×512) Pixel. Im letzteren Fall, verschwinden die Pixel praktisch vollständig unter der Linienbreite. Speziell im (32×32)-Fall sieht man, was passiert, wenn die realen Punkte eher am Rand der Pixel zu liegen kommen.
 .
.Weiter im nächsten Teil.
