
In Teil 3 haben wir aus unseren »Schattenmessungen« ein sehr grobes Bild unserer Objekte rekonstruiert. Im Folgenden sehen wir uns einige bessere Rekonstruktionen an.

Abb.1 zeigt eine (128×128)-Pixel Rekonstruktion von einem 512-Pixel Detektor, der alle 0.5° ein Bild gemessen hat. Die Lage der drei Objekte ist sehr gut zu erkennen, die Form passt allerdings nur für den Kreis ganz gut; bei Dreieck und Quadrat geht der schwarze Bereich teilweise weit über die Kanten hinaus. Zusätzlich erkennt man mehrere dunkle und helle Linien (Streifenartefakte) zwischen und über die Objekte hinaus gehend.
Die starke Sichtbarkeit dieser Artefakte liegt daran, dass die Objekte das Licht komplett absorbieren (Absorptionskoeffizient unendlich). Ehrlich gesagt, ich hätte mir für den Bereich zwischen den drei Figuren sogar noch Schlimmeres erwartet. Speziell in medizinischen Anwendungen mit Röntgenstrahlung ist der Absorptionskoeffizient viel kleiner als unendlich, aber auch hier lassen sich Streifenartefakte nicht komplett vermeiden (wie wir noch sehen werden).
Die inkorrekten Kanten von Dreieck und Quadrat hängen teilweise auch mit der unrealistischen Absorption zusammen. Allerdings kommt hier ein weiteres Problem dazu, das man aber durch Filterung vor der Rückprojektion reduzieren kann (auch das werden wir noch sehen).
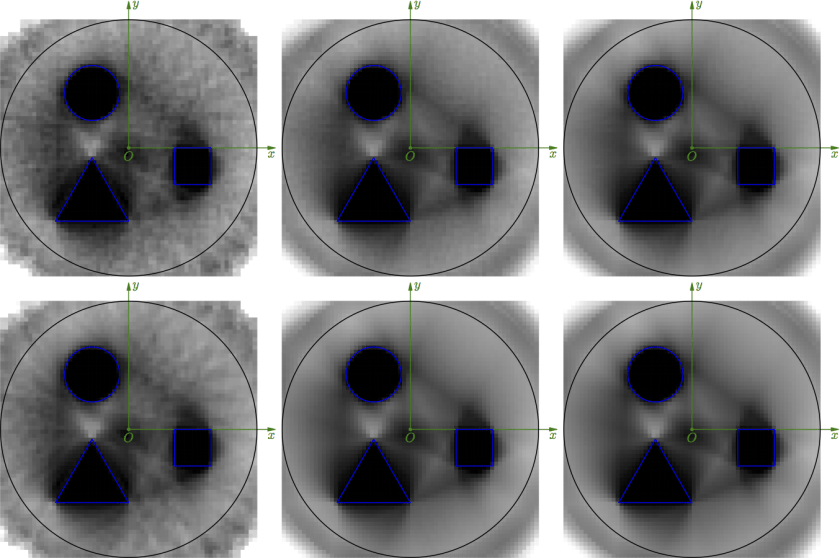
Abb. 2 zeigt verschiedene Rückprojektionen auf ein (64×64)-Pixel Bild. Vergleicht man die Ergebnisse zwischen einem 128-Pixel Detektor (obere Zeile) und einem 512-Pixel Detektor (untere Zeile), erkennt man, dass die höhere Pixel-Anzahl zu einem reduzierten Farbrauschen führt, die Farbübergänge also sanfter werden.
Ähnliche Verbesserungen ergeben sich innerhalb einer Zeile, wenn man bei mehr Winkeln misst. Vergleicht man die Rekonstruktion eines 128-Pixel Detektors mit 0.5°-Auflösung (oben rechts) mit der eines 512-Pixel Detektor mit 2°-Auflösung (unten Mitte), scheint letzterer ein leicht besseres Ergebnis zu liefern. Mehr Detektor-Pixel scheinen also besser zu sein, als eine bessere Winkelauflösung. Beim 512-Pixel Detektor bringt die Vervierfachung der Winkelauflösung (unten rechts) auch kaum noch ein besseres Ergebnis.
Weiter in Teil 5.
