
Im letzten Beitrag haben wir begonnen, unsere Kamera zu »bewegen«. Allerdings war sie immer noch relativ groß und sehr nahe an den Objekten dran. In diesem Beitrag werden wir jetzt die Sensorgröße ändern und zoomen – bzw. mit dem Rest der Welt wieder das Gegenteil machen.
Die Animation in Abb. 1 zeigt unser Ziel: Wir simulieren eine Kleinbildkamera mit einem Bildsensor der Größe 36 mm x 24 mm (»full-frame«). Typischerweise kann man dann verschiedene Objektive aufsetzen, die sich in erster Linie durch ihre Brennweiten unterscheiden. Je größer die Brennweite, desto größer der Zoom.
Die Kamera steht an einem fixen Ort und hat zunächst nahe herangezoomt (Brennweite 135 mm). Anschließend zoomt sie heraus (bis Brennweite 24 mm) und dann wieder hinein. Je kleiner die Brennweite, desto kleiner erscheinen die Objekte. Gleichzeitig sieht man mehr von der Umgebung.
Weiterlesen „Malen mit Zahlen, Teil RS5 – Zoomen mit der Kamera“
 und
und  liegen, gehören auf jeden Fall dazu. Aber welche noch?
liegen, gehören auf jeden Fall dazu. Aber welche noch?
 handelt, ist das Gitter sinnvollerweise quadratisch, und die Anzahl der Pixel in
handelt, ist das Gitter sinnvollerweise quadratisch, und die Anzahl der Pixel in  – und
– und  -Richtung wird gleich gewählt, also
-Richtung wird gleich gewählt, also  . Die Pixel sind dann Quadrate mit einer realen Seitenlänge von
. Die Pixel sind dann Quadrate mit einer realen Seitenlänge von  . Um die Formeln etwas zu vereinfachen wählen wir für
. Um die Formeln etwas zu vereinfachen wählen wir für  eine gerade Zahl, was keine große Einschränkung bedeutet.
eine gerade Zahl, was keine große Einschränkung bedeutet.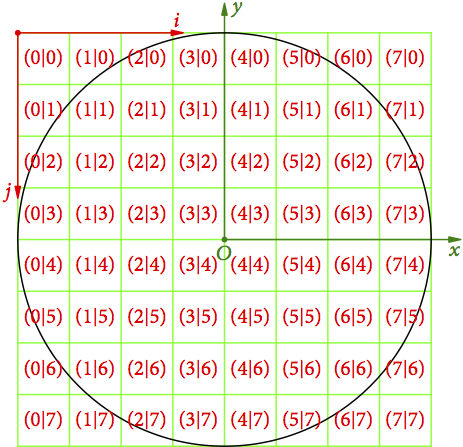
 -Achse zeigt wie die
-Achse zeigt wie die  -Achse zeigt entgegen der
-Achse zeigt entgegen der 