
Vor einger Zeit haben wir diskutiert, dass ein Kondensator und ein Widerstand ziemlich gut differenzieren/ableiten können. In diesem Beitrag werden wir sehen, dass das auch fürs Integrieren gilt.
(Wer schon integrieren kann, kann den folgenden Abschnitt überspringen.)
Integrieren
Wenn wir den Graphen einer Funktion zeichnen, bekommen wir eine Kurve in einem Koordinatensystem. Dabei stellt sich geometrisch z.B. die Frage, wie steil die Kurve relativ zur horizontalen Achse ist. Die Antwort gibt uns die Ableitung der Funktion, also ihre Änderungsrate. Und die können wir durch Differenzieren der Funktion berechnen.
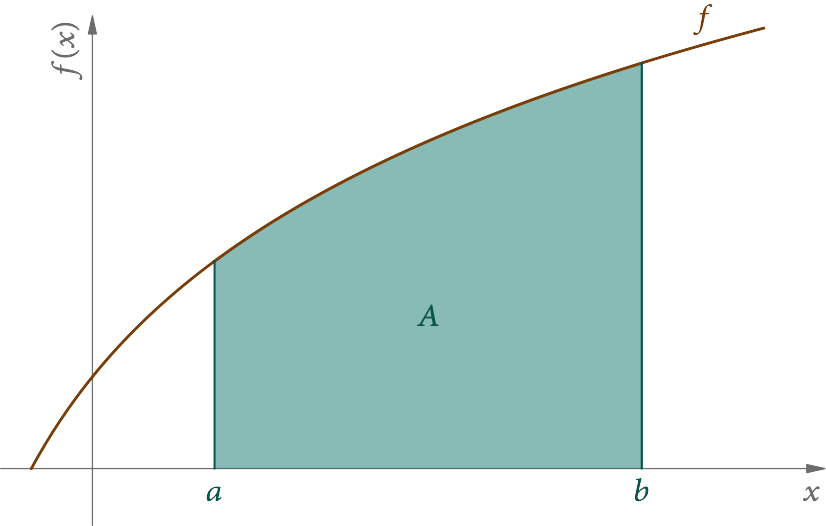
Eine andere geometrische Frage ist nach der Größe des Flächeninhalts A zwischen Funktionsgraph und horizontaler Achse (s. Abb. 1). Dabei wollen wir annehmen, dass unser Graph von f (die »Randkurve«) bis auf Sprungstellen oder punktförmige Lücken stetig ist.
Um den Flächeninhalt A zu abzuschätzen, können wir unsere Fläche in n Rechtecke unterteilen (s. Abb. 2). Zur Vereinfachung sollen die Rechtecke alle dieselbe Breite 

Die Summe der Flächeninhalte dieser Rechtecke ist dann eine Näherung für unser gesuchtes A:

Wenn wir die Anzahl der Rechtecke immer größer machen (


Das Integralzeichen 
Bislang ist das Ganze nur eine neue Schreibweise, weil wir außer der Rechteckssumme nicht wissen, wie wir es ausrechnen können.
Nehmen wir jetzt wie in Abb. 3 an, dass wir unseren Flächeninhalt wenn nicht bis b, dann zumindest bis zu irgendeinem 
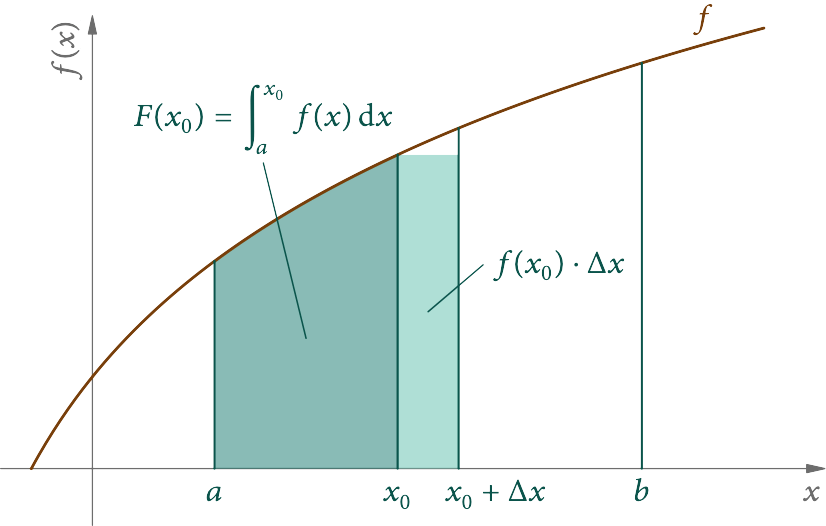
Dieser Flächeninhalt ist dann der Wert der Flächeninhaltsfunktion F an der Stelle

Wenn wir ein kleines Stück 


Umformen nach f liefert uns:

Im Grenzübergang

Das heißt, die Ableitung (momentane Änderungsrate) der Flächeninhaltsfunktion F ist gleich dem Funktionswert der Randkurve f an dieser Stelle. Interessant!
Wenn wir also eine Funktion F finden, mit 

Es gibt aber einen kleinen Schönheitsfehler: Beim Ableiten fallen additive Konstanten weg. Wenn wir Pech haben, erwischen wir also nicht unser gesuchtes F, sondern eine andere Stammfunktion G mit 

Weil bei a unsere Fläche erst anfängt, muss 

Wenn wir dieses k wieder von G abziehen, bekommen wir unser gesuchtes F, und damit

Statt

können wir für eine Stammfunktion G auch das unbestimmte Integral

schreiben. Das schaut beeindruckend aus, aber bedeutet nur, dass wir unsere Tabellen mit den Ableitungen in die andere Richtung lesen müssen. In diesem Sinn sind Ableitung und Integral Umkehroperationen zueinander. Das k nennt man die Integrationskonstante.
Solange unsere Randkurve f im Wesentlichen stetig ist (allgemeiner: Riemann-integrierbar ist), funktioniert die Sache auf jeden Fall. Bei komplizierteren Funktionen landet man beim Lebesgue-Integral, wo obige Überlegungen nicht an jeder Stelle gelten, sondern nur an »fast jeder«.
Falls die Randkurve f in einem Bereich negativ wird, wird auch die Fläche dort negativ gezählt. Wenn wir also an der tatsächlichen geometrischen Fläche interessiert sind, müssen wir 
Integrierer
Wie wir oben gesehen haben, sind Differenzieren und Integrieren im Wesentlichen Umkehroperationen zueinander. Wenn wir Kondensator und Widerstand vertauschen, erhalten wir entsprechend statt einem Differenzierer einen Integrierer (s. Abb. 4 in Vergleich zu Abb. 3 aus dem letzten Beitrag.).

 soll das Integral der Eingangsspannung
soll das Integral der Eingangsspannung  sein.
sein.Warum? Durch beide Bauteile fließt immer noch derselbe Strom

Unsere Ausgangsspannung ist jetzt aber die Kondensatorspannung

Wir müssen 




(Auch beim Integrieren können wir konstante Faktoren wie R herausheben.)
Falls hier jetzt
Wie Abb. 5 andeutet, ist
Oder anders begründet:

aber

Je größer die Kreisfrequenz 
Im Gegensatz zum Differenzierer funktioniert der Integrierer bei hohen Frequenzen besser. Schauen wir uns den Integrierer also wieder im Frequenzbereich an.
idealer Integrierer
Wenn wir ein sinusförmiges Signal

integrieren, erwarten wir bis auf eine additive Integrationskonstante

Der Faktor 
Das Integral einer allgemeinen Sinus-Funktion ist also auch eine allgemeine Sinus-Funktion derselben Frequenz. Das Verhältnis der Amplituden von Integral und Signal ist

also indirekt proportional zur Frequenz. Die Phasenverschiebung von Signal zu Integral beträgt -90°.
nicht-idealer Integrierer
Obwohl wir jetzt R und C vertauscht haben, handelt es sich bei der Schaltung in Abb. 4 immer noch um einen komplexen Spannungsteiler. Es sind nur die Impedanzen vertauscht, und statt 
Für das Verhältnis der beiden Spannungsamplituden erhalten wir

Im Gegensatz zum Differenzierer sind es jetzt die großen Frequenzen, bei denen wir den addierten Einser vernachlässigen können, wodurch das Amplitudenverhältnis indirekt proportional zur Frequenz wird:

Für einen Integrierer muss die Grundkreisfrequenz unseres Signals daher viel größer sein als die Grenzkreisfrequenz 
Die Phasenverschiebung von u zu
Wenn wir weit oberhalb der Grenzfrequenz sind, ist 
Für kleine Frequenzen hingegen wird die komplexe Spannungsverstärkung 

Bode-Diagramm
Abb. 6 vergleicht einen idealen Integrierer mit unserem RC-Tiefpass im Bode-Diagramm.
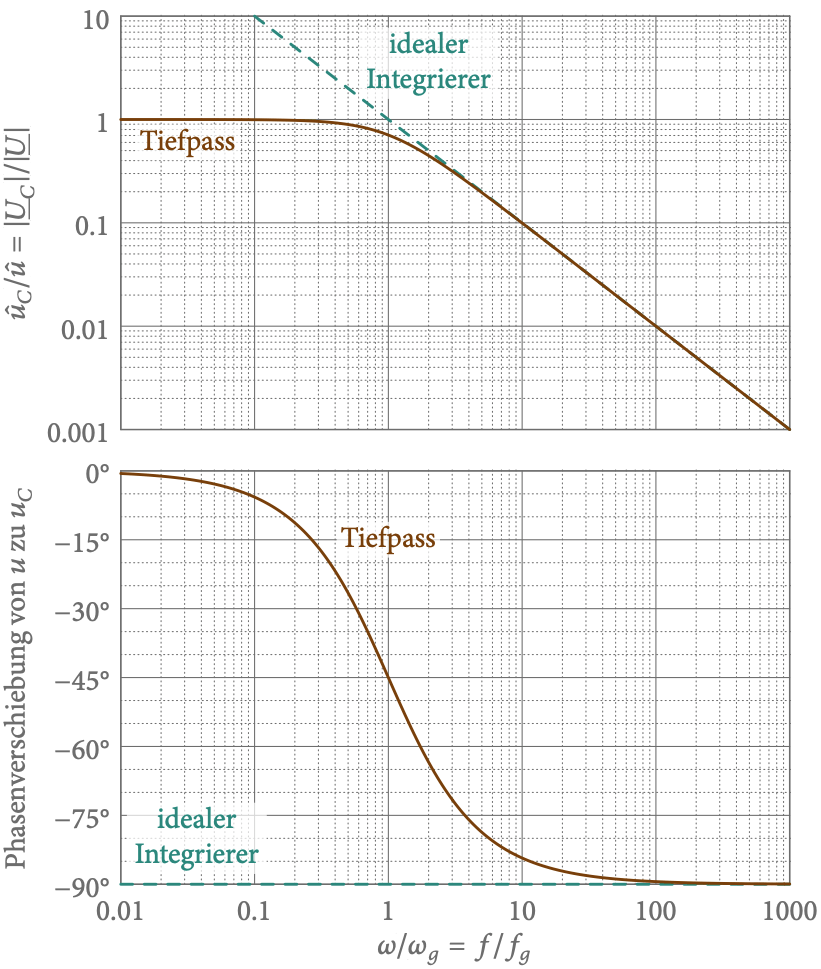
In einem doppelt-logarithmischen Koordinatensystem wird eine indirekte Proportionalität als Gerade mit Steigung -1 dargestellt. Aus 

Wie wir es für einen idealen Integrierer gerne hätten, ist das Amplitudenverhältnis für große Frequenzen tatsächlich indirekt proportional zur Frequenz. Ebenso liegt die Phasenverschiebung bei knapp -90°. Wenn wir uns der Grenzfrequenz 
Beispiele
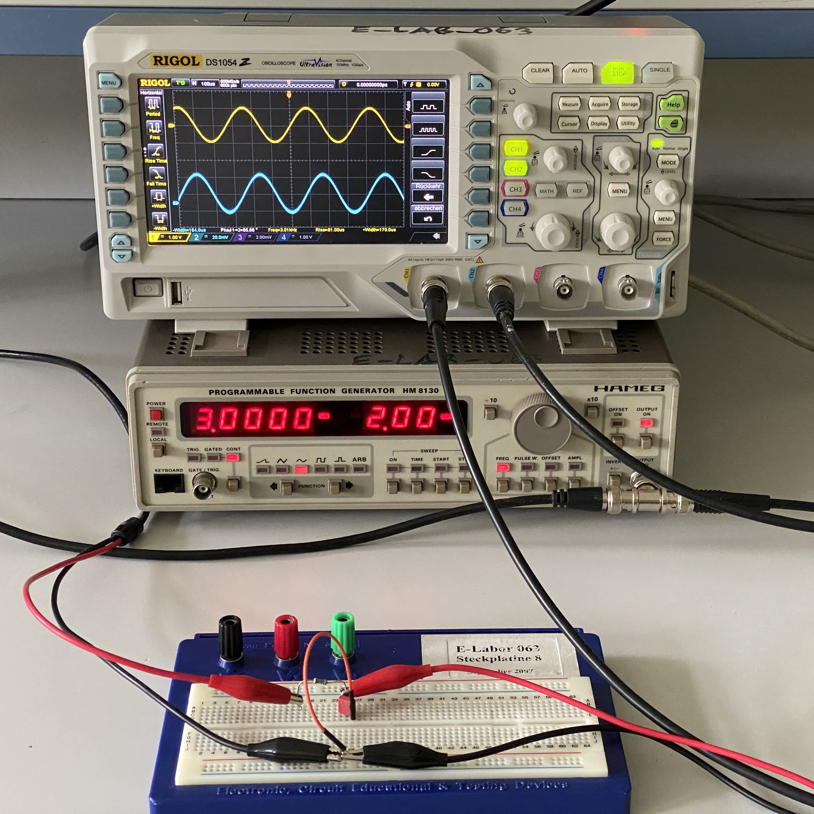
Der Aufbau für den Integrierer ist in Abb. 7 gezeigt. Das Eingangssignal wurde von einem Funktionsgenerator erzeugt. Es geht über ein T-Stück in die Schaltung und in Kanal 1 des Oszilloskops. Das Ausgangssignal geht in Kanal 2 des Oszilloskops.
Wir wollen jetzt eine kleine Grenzfrequenz, also brauchen wir einen großen Widerstand und eine große Kapazität.
Als Widerstand habe ich einfach 


Abb. 8 zeigt das Ergebnis zunächst wieder für ein reines Sinus-Signal. Die Ausgangsspannung ist ziemlich genau eine Viertelperiode nach hinten geschoben, was einem minus Cosinus entspricht. Das Amplitudenverhältnis ist ungefähr 0.024, was genau dem erwarteten Wert für unsere Frequenzen entspricht.
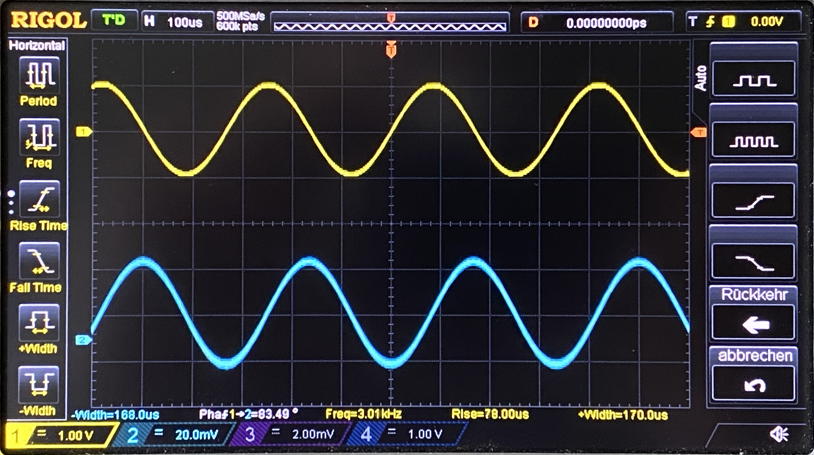
Wie schon beim Differenzierer verwendet das Oszilloskop eine sehr komische Vorzeichenkonvention, was die Phasenverschiebung von Kanal 1 zu Kanal 2 betrifft. Aus mathematischer Sicht wird das falsche Vorzeichen angezeigt.
Die Integration eines Dreieck-Signals ist in Abb. 9 gezeigt. Das Integral sieht ein bisschen wie minus der Cosinus aus. Im Vergleich mit Abb. 8 sieht man, dass die Maxima und Minima etwas runder sind. Das Integral einer linearen Funktion ist nämlich quadratisch. Hier folgt also ein Parabelbogen auf den nächsten. Wenn die lineare Funktion steigt, ist der Bogen nach oben offen (positiv gekrümmt), ansonsten nach unten offen (negativ gekrümmt).

Die Integration eines Rechteck-Signals wird noch in Abb. 10 gezeigt. Wenn die Eingangsspannung konstant ist, nimmt die Fläche mit der Zeit linear zu oder ab. Das Integral ist daher eine Dreieck-Spannung.

Diskussion
Zumindest für ein paar periodische Funktionen haben wir gesehen, dass ein Kondensator und ein Widerstand differenzieren bzw. integrieren können. Bei beiden muss man auf die verwendeten Frequenzen achten: Der Differenzierer funktioniert gut für kleine Frequenzen, der Integrierer für große Frequenzen.
Wie wir auch gesehen haben, ergänzen sich die Diskussionen im Zeit- und Frequenzbereich. Im Zeitbereich ist klar, dass die Ableitung bzw. das Integral des Signals klein sein müssen. Aber erst im Frequenzbereich sehen wir, wann das wirklich der Fall ist.
Vom Funktionsgenerator wurden alle Signale mit Mittelwert 0 geliefert. Entsprechend sind alle gelben Pfeile (links) genau in der Mitte der Signale. Beim Integrieren wird aber noch die Kondensatorspannung
